


2.1. ALAT DAN BAHAN
ALAT :
1. Multimeter digital
2. Obeng + - 3mm
3. OCR Osciloscop
4. Solder
5. Timah
6. Power Supply +12V/3A
7. Tang potong
8. Tang cucut
9. Cutter
10. Gunting
BAHAN :
Daftar Komponen Rangkaian Driver Motor
1. Resistor 470, 270, dan 1,5k ohm
2. Mosfet IRFZ44n
3 Terminal screw
4 Optoisolator PC817
Daftar Komponen Rangkaian Driver H-BRIDGE
1. Transistor PNP TIP41C
2. Transistor NPN TIP42C
3 Resistor 270 & 220 ohm
4 Dioda Schottky IN5819
5 Terminal screw
Daftar komponen rangkaian Minimum Sistem Mikrokontroler ATMEGA16
1. IC 1 Max 232
2. IC 2 ATMega 16
3 Ic Regulator 7805
4 Resistor (R1) 270(0.25 watt)
5 Resistor (R2) 10K(0.25 watt)
6 TrimpotADCVREF 20 k
7 Capasitor 22pF
8 Capasitor 100nF
9 Capasitor 1uF
10 Capasitor 47uF
11 Capasitor 470uF
12 Diode 1N4007
13 Header cover 2x5 pin
14 Db9 Female pcb
15 Cristal 12 Mhz
16 Led Putih
17 Conector DC pcb
Daftar komponen rangkaian LCD
1. Variabel resistor 20 kohm
2. Dioda IN4002
2.2. PERCOBAAN
Percobaan dilakukan dengan spesifikasi rangkaian berikut ini :
Beban : Motor DC Gear Box 1,2 A
Power Supply : +12V / 3A (Switching)
Mikrokontroler : ATMEGA16 (Antarmuka dan pembangkit PWM)
Driver Motor : Tegangan input 0V – 5 V
Tegangan output 0V – 12 V
Arus output maksimal 35 A (Imaks mosfet IRFZ44n)
Driver H-BRIDGE : Tegangan supply 0V – 12 V
Tegangan input 0V / 5 V
I output maksimal 6 A (Imaks transistor TIP41C & TIP 42C)


DRIVER MOTOR
Input-1 : mikrokontroler (Pulse Width Modulation (PWM))
Power-1 : 12V
Power-2 : 0V
Output1-1 : (-) Motor
Output1-2 : (+) Motor
R5 : 470 Ω
Resistor ini digunakan untuk mengkondisikan input dari mikrokontroler pada kondisi low mempunyai nilai 0V.
R6 : 270 Ω
R7 : 1500 Ω
R6 dan R7 digunakan sebagai pembagi tegangan untuk memperoleh output sebesar 10 V dari tegangan sumber yang akan digunakan sebagai tegangan input Mosfet. Sesuai datasheet, dari tegangan sebesar 10V tersebut, IRFZ44n dapat mengalirkan arus maksimal sebesar 35A.
Optoisolator : PIC817 digunakan sebagai pengaman mikrokontroler agar tidak terjadi arus balik pada saat motor mengalami overload.
DRIVER H-BRIDGE
Input-2 : mikrokontroler (digital input 0V / 5V)
Input-3 : mikrokontroler (digital input 0V / 5V)
Output-1 : (-) Motor
Output-2 : (+) Motor
R1 : 270 Ω
: Ic adalah arus dari beban yang mengalir melalui saklar transistor.
: Vbe adalah tegangan yang dibutuhkan untuk mengaktifkan transistor.
R2 = R1 : 270 Ω
R4 : 220 Ω
Ic = 1A – (0,044A + 0,044A)
Ic = 0,912A
R3 = R4 : 220 Ω
2.3. HASIL PERCOBAAN
Analisa Rangkaian Driver H – Bridge
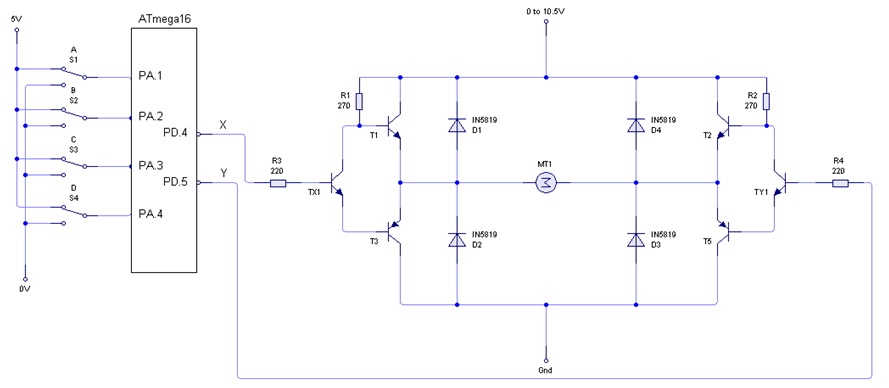

1 . Jika TX1=0 maka T1=1 dan T3=0 sehingga tegangan A=V sumber.
Jika TY1=0 maka T2=1 dan T4=0 sehingga tegangan B=V sumber.

Karena tegangan di A dan B adalah “SAMA” maka tidak ada beda potensial diantara dua kutub motor sehingga motor “DIAM” tidak bergerak kemanapun.
2 . Jika TX1=0 maka T1=1 dan T3=0 sehingga tegangan A=V sumber.
Jika TY1=1 maka T2=0 dan T4=1 sehingga tegangan B= 0.

Karena tegangan di A adalah V sumber dan B adalah “0” maka terdapat beda potensial diantara dua kutub motor sehingga motor “Berputar” berlawanan jarum jam (CCW).
3 . Jika TX1=1 maka T1=0 dan T3=1 sehingga tegangan A= 0.
Jika TY1=0 maka T2=1 dan T4=0 sehingga tegangan B=V sumber.

Karena tegangan di A adalah “0” dan B adalah v sumber” maka terdapat beda potensial diantara dua kutub motor sehingga motor “Berputar” searah jarum jam (CW).
4 . Jika TX1=1 maka T1=0 dan T3=1 sehingga tegangan A=0.
Jika TY1=1 maka T2=0 dan T4=1 sehingga tegangan B= 0.

Karena tegangan di A adalah “0” dan B adalah “0” maka tidak ada beda potensial diantara dua kutub motor sehingga motor “DIAM” tidak bergerak kemanapun.